Ремонт авто
Борьба с коррозией днища кузова с помощью герметика
Кузов автомобиля может быть красивым, но нельзя игнорировать днище. Даже если машина сияет полировкой, днище все равно может быть безвозвратно потеряно. Коррозия днища является критерием отказа при техническом осмотре. Единственное, что обеспечивает надежную защиту колесных колпаков, порогов и днища от коррозии, — это покрытие полостей и герметик. К сожалению, ни одна из мер не предлагает постоянного решения, и периодические проверки, особенно в старых автомобилях, необходимы. Это руководство посвящено нижней герметизации (Am: грунтовка) и расскажет вам все, что вам нужно знать о профессиональной герметизации для предотвращения коррозии. Недопустимая комбинация Автомобили по-прежнему состоят в основном из стальных панелей. Ни один другой материал не предлагает такого благоприятного соотношения способности к формованию в холодном состоянии, прочности и разумной цены. Основным недостатком…
Как заменить масло в коробке передач? – Сделай сам – инструкция
Замена масла в автомобиле настолько же необходима, насколько и дорога. Для большинства автомобилей нет необходимости посещать гараж . Имея немного технических навыков, вы можете заменить масло в коробке передач самостоятельно и сэкономить деньги. Мы покажем вам, как можно легко заменить масло и на что всегда следует обращать внимание. Зачем вообще менять масло в коробке передач? Масло является важной смазкой в каждом автомобиле, предотвращая трение в подвеске и приводной технике . Металлические детали вездесущи в двигателе, быстро нагреваются и вступают в контакт друг с другом. Без масла в качестве смазки вскоре возник бы износ, что привело бы к серьезному повреждению коробки передач. Трансмиссионное масло предотвращает нежелательное трение, продлевая срок службы автомобиля. К сожалению, трансмиссионное масло со временем теряет свою эффективность. Пыль…
Повреждение двигателя автомобиля – Держите двигатель здоровым и подтянутым!
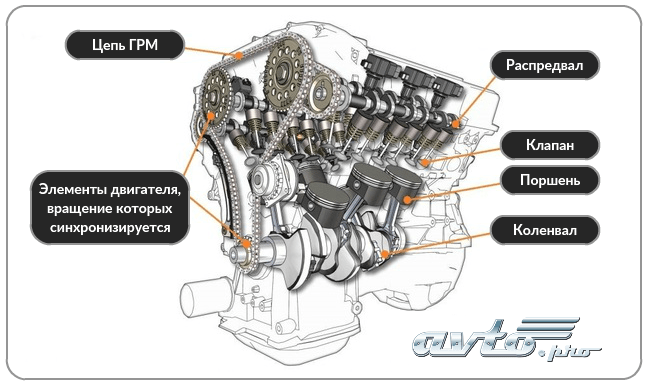
Повреждение двигателя автомобиля – дело дорогое. Привод представляет собой сложную конструкцию, состоящую из сотен деталей, которые необходимо точно настроить. Современные двигатели служат сотни тысяч километров. Условием для этого является тщательное и регулярное техническое обслуживание двигателя. Прочтите здесь, что нужно соблюдать для безопасной работы вашего двигателя. Что нужно двигателю? Для своей работы двигатель нуждается в шести элементах:– топливо– электроподжиг– воздух– охлаждение– смазка– управление (синхронизация)Если один из первых трех выходит из строя, то, как правило, выходит из строя и двигатель. Эти ошибки часто легко устраняются. Если затронуты охлаждение , смазка или управление , это может привести к повреждению. Правильно смазанный, безопасно управляемый Двигатель смазывается циркуляцией масла. Смазка прокачивается через весь двигатель с помощью моторного насоса, в результате чего все движущиеся компоненты подходят с минимальным трением. Металлические…
Автомобиль не заводится – возможные причины и способы их решения
Автомобиль отказывается заводиться или двигатель просто глохнет во время движения – это настоящая неприятность, хотя причин для паники нет. Более чем вероятно, что неисправность вызвана незначительным дефектом. Однако поиск причины требует досконального знания работы автомобиля. Прочитайте все о том, что может вызвать остановку автомобиля в этом руководстве и как вы можете помочь себе в таком случае. Что нужно автомобилю для вождения? Автомобиль с двигателем внутреннего сгорания нуждается в шести элементах, чтобы обеспечить движение. Это: Топливо: бензин, дизель или газ.Привод: ремни, настраивающие движущиеся компоненты.Энергия: ток электрического зажигания для работы стартера.Воздух: для приготовления воздушно-топливной смеси.Масло: для смазки подвижных элементов.Вода: для охлаждения двигателя. При выходе из строя только одного из этих элементов глохнет весь двигатель. В зависимости от того, какая система повреждена, автомобиль либо…
- Интересные статьи, Полезные советы автомобилистам, Ремонт авто, Ремонт двигателя, Советы автомобилистам, Статьи, Эксплуатация машин
О чем говорит мне моя машина – учимся понимать звуки вождения!
Услышав, как что-то свистит, скрипит или гремит в машине, вы должны буквально навострить уши. Натренированный слух мог предотвратить опасные ситуации, дорогостоящий ремонт или поломку автомобиля. В этой статье вы прочтете, как определить наиболее распространенные звуки вождения. Систематическое сужение В движущейся машине есть движение во всех уголках и закоулках . Двигатель работает, передачи переключаются, колеса катятся по дороге, подвеска подпрыгивает, выхлоп качается на днище, сдувая выхлопные газы. Для выявления этих специфических звуков вождения требуются систематические действия. Если возможно, отключите как можно больше систем, чтобы отследить причину шума, как детектив. Поэтому самым важным условием вашего поиска является беспрепятственное вождение . В идеале нужно найти место, где не ожидаются другие участники дорожного движения. В любом случае это должна быть асфальтированная дорога. Удары и толчки…
Всегда иметь четкое представление? Что делать с разбитым лобовым стеклом!
Лобовое стекло – самое важное окно для водителя. Без четкого, беспрепятственного обзора дороги безопасное вождение невозможно. Поэтому закон особенно суров в отношении состояния лобового стекла. Читайте в этой статье, на что обращать внимание за лобовым стеклом и что делать в случае его повреждения. Возможные повреждения лобового стекла Ветровое стекло защищает от сильного давления потока ветра по мере увеличения скорости . Он улавливает всю силу ветра и все объекты, которые он несет. Даже мельчайшие частицы песка могут оставить неизгладимое впечатление на переднем экране. Вдобавок к царапинам и трещинам постоянное скопление пыли на переднем стекле способствует постепенному ухудшению видимости. В дополнение к повреждению камнем и постепенному царапанью, кручение кузова может вызвать внезапную трещину на лобовом стекле вашего автомобиля . Даже незначительное…
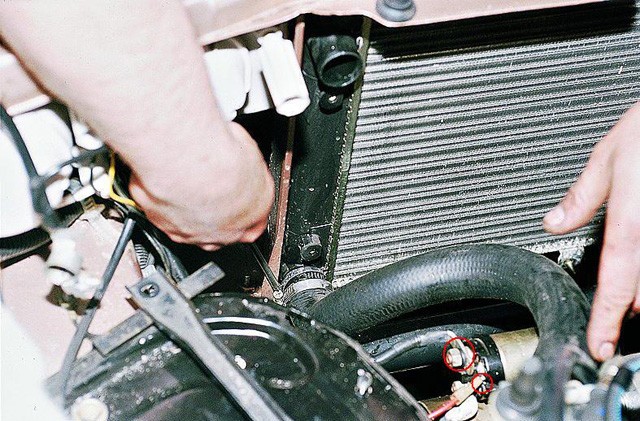
Замена автомобильного радиатора – как это делается!
Если температура двигателя постоянно превышает идеальный уровень, удерживая двигатель в опасной близости от точки кипения, важно как можно скорее найти причину. Откладывание этого неизбежно приводит к прогоранию прокладки головки блока цилиндров. Прочтите в этом руководстве, как контролировать радиатор автомобиля при перегреве двигателя, пока не стало слишком поздно. Важна рабочая температура Двигатель должен достичь своей рабочей температуры как можно быстрее и поддерживать ее на постоянном уровне, чтобы нормально функционировать. Основная причина кроется в свойствах нагретого металла. Все металлические детали двигателя расширяются при нагревании . Температуры, вызванные внутренним трением и, в частности, горением, очень высоки. Поэтому все компоненты двигателя неизбежно расширяются . Во избежание заклинивания прогретого двигателя все детали в холодном состоянии имеют определенный зазор. Этот зазор обеспечивает так называемую скользящую посадку , как только детали…
Вам также может понравиться

Салонный фильтр на Мерседесе glk

Замена рулевых тяг BMW E39

Как купить зеркало для слепых зон хорошего качества
Как правильно проверять и менять тормозную жидкость!
Способность автомобиля тормозить гораздо важнее, чем способность ехать. Поэтому тормозная жидкость на сегодняшний день является самой важной рабочей жидкостью в каждом автомобиле. Если его нет или с ним что-то не так, безопасность автомобиля и всех остальных участников движения находится под угрозой. Прочитайте в этой статье все, что вам нужно знать о тормозной жидкости. Гидравлическая передача усилия и наддув Тормозная система , за исключением стояночного тормоза, в семейных автомобилях приводится в действие гидравликой , что означает, что тормозное усилие передается через жидкости . Жидкости обладают свойством равномерно распределяться внутри системы трубок и реципиентов и не могут быть сжаты. Усилие, прилагаемое, например, при нажатии на педаль тормоза, немедленно воздействует на всю систему. В качестве альтернативы существуют пневматические тормозные системы, а также гибридные системы,…
Как заменить масло гидроусилителя рулевого управления — плавное вождение со свежей жидкостью рулевого управления!
Как пользователь автомобиля, вы, вероятно, знаете все о замене масла , хотя это обычно относится к замене моторного масла. В транспортном средстве есть и другие жидкости, и их заменой не следует пренебрегать. Помимо масла в коробке передач и масла в дифференциале, масло для гидроусилителя руля не вечно. Мы покажем, как заменить масло в тормозной системе и усилителе руля. Компоненты и функция гидроусилителя руля Усилитель руля — это модуль, который значительно облегчает поворот рулевого колеса . Первоначально это было разработано исключительно для грузовиков, но теперь является стандартным и для компактных автомобилей. В состав гидроусилителя рулевого управления входит– гидроцилиндр– гидронасос– шланги– расширительный бачок Как правило, гидравлический насос приводится в действие ремнем. Вращательное движение создает давление, включающее систему рулевого управления с усилителем. Гидравлический…
Вам также может понравиться

Что можно и чего нельзя делать при запуске автомобиля
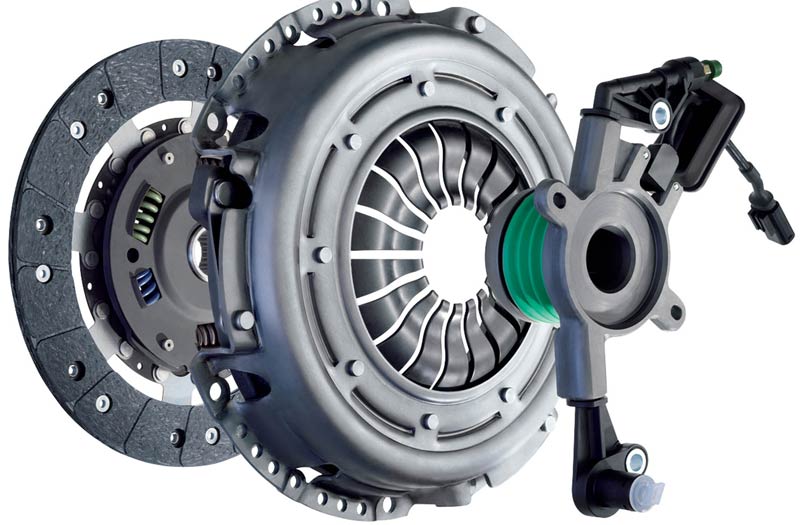
Как долго длится сцепление?

Как заменить топливный фильтр
Проблемы с боковым стеклом? Вот как вы можете легко решить их!
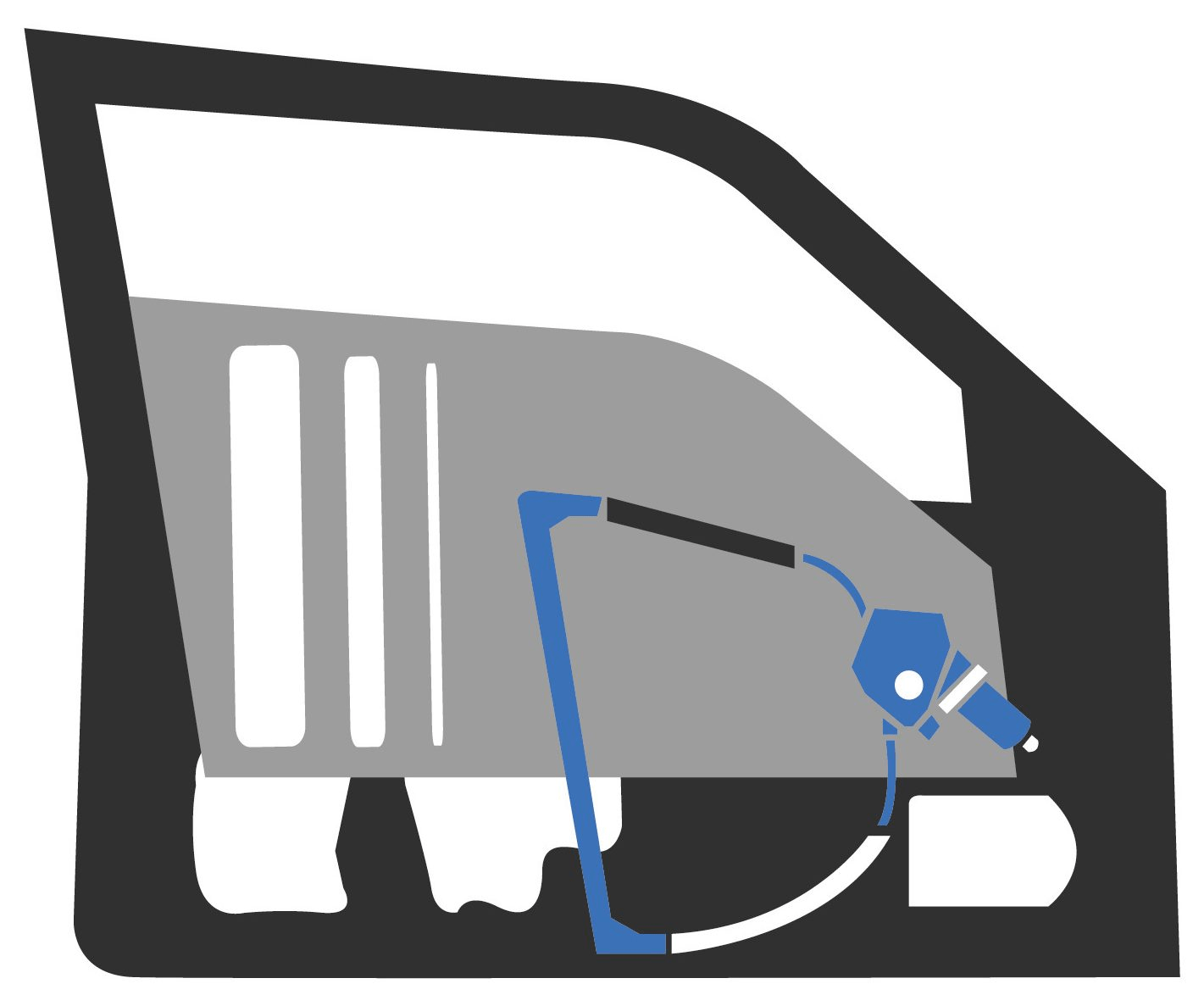
Боковое стекло — компонент автомобиля, которым обычно пренебрегают. Годами надежно выполняет свою задачу. А потом вдруг исчезает в дверце машины и все попытки поднять ее вызывают только неприятный скрежет. Это звучит драматично; тем не менее эту ситуацию можно относительно легко исправить. Прочтите здесь, что вам нужно для ремонта бокового окна. Скрытая конструкция с капризами Технически боковое стекло во всех автомобилях одинаковое: оно прямо или косвенно крепится на рейке двумя зажимами. Рельс соединен с рычажным механизмом, приводимым в действие ручным открывателем окон или электродвигателем. Окно, упавшее в дверь, оторвалось от рельса. Это можно исправить, но действовать нужно адекватно и тщательно . Доступ к окну без причинения ущерба Чтобы можно было отремонтировать систему оконных направляющих, сначала следует оголить рычажный механизм . Это первая…
Вам также может понравиться
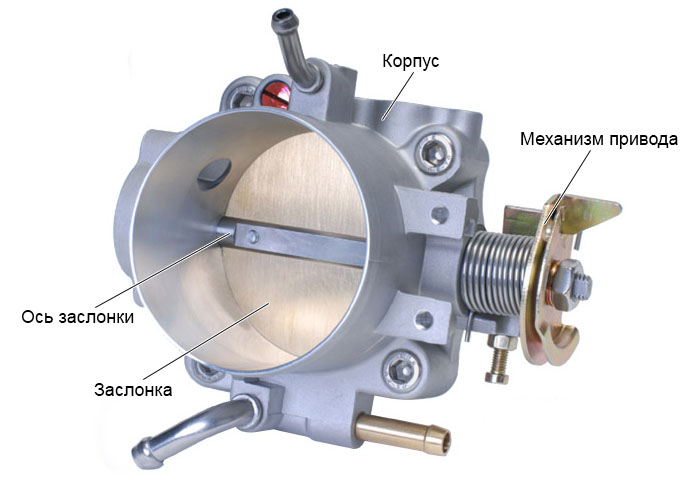
Дроссельная заслонка

Как прикрепить брызговики вторичного рынка
Симптомы плохого или неисправного ремня нагнетателя
Развал-схождение: несоосность колес – дорого и опасно
Несоосность колес – это больше, чем просто неприятность. Вы можете привыкнуть к тому, что автомобиль слегка тянет в сторону, хотя, вероятно, не так скоро к быстрому износу шин. Если автомобиль подозревается в несоосности колес, с этим следует быстро разобраться. Симптомы несоосности колес Несоосность колес можно обнаружить разными способами. Что вызывает несоосность колес? Подвеска колес регулируется по углу кастера и развала . Его целью является максимально возможное параллельное выравнивание всех четырех колес при прямолинейном движении. Только в этом состоянии автомобиль действительно надежно едет по прямой. Существует четыре основные причины несоосности колес: – возрастной развал– некачественный ремонт– повреждение шасси– повреждение кузова Автомобиль с пробегом в несколько десятков тысяч миль на одометре может показывать слегка смещенное отслеживание. В этом…
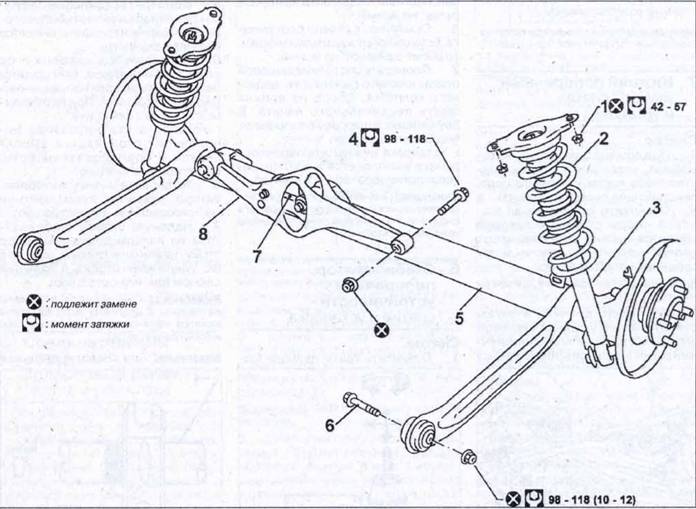
Когда машина виляет налево и направо — как заменить амортизаторы и пружины!
Амортизаторы изнашиваются медленно. Долгое время не замечаешь, как качество вождения постепенно ухудшается. Рано или поздно наступает момент, когда вы больше не можете игнорировать губчатое рулевое управление: явный сигнал об изношенных амортизаторах. Это не только неудобно, но и опасно. Прочитайте здесь все, что вам нужно знать о замене амортизаторов. Конструкция и функция амортизатора Амортизатор поглощает движения колес при проезде неровностей, передавая их на кузов демпфировано и с задержкой. Это делает вождение более комфортным и безопасным. Автомобиль держит курс и не виляет во время движения. В настоящее время трудно представить, насколько неудобным должен был быть транспорт в эпоху автобусов. Мало того, что улицы были такими же гладкими и ровными, как сейчас. Транспортные средства были оснащены очень примитивной подвеской. Фантастическая конструкция из кожаных…
Покраска тормозного суппорта: важная деталь и настоящее зрелище!
В качестве компонента тормозной суппорт находится на заднем ряду. Его даже не видно на машине с обычными колесными дисками или колпаками. Так зачем вообще его рисовать? Читайте здесь, как обновить суппорт и сделать ваш автомобиль красивым. Поэтому вам нужно только внимательно присмотреться к колесным дискам. Их конструкция, как правило, очень филигранная и тонкая. Это снижает вес и обеспечивает хороший обзор колесного механизма. Хорошо виден висящий там суппорт : серовато-черный, грязный и ржавый . Между красивыми алюминиевыми колесными дисками и чистым тормозным диском он выглядит грязным. Особенно если вы вложились во внешний вид автомобиля, неокрашенный тормозной суппорт вызывает смущение. Розничная торговля и промышленность уже адаптировались к этой проблеме. Только один путь правильный Есть несколько вариантов покраски автомобиля. Распылительная окраска и обертывание являются обычными процедурами. Если бюджет ограничен, а автомобиль —…
Вам также может понравиться

Замена масла в двигателе Мерседес

Способы возврата упругости просевших пружин автомобиля
Как работает цепь ГРМ?
Держим прямую колею – заменяем поперечный рычаг – инструкция!
Поперечный рычаг является частью геометрии рулевого управления, соединяющей переднее колесо с шасси автомобиля. Поперечный рычаг очень подвижен с определенным боковым люфтом, обеспечиваемым его подшипниками. Эти подшипники или втулки состоят из цельной резиновой муфты, жестко напрессованной на поперечный рычаг. Когда резина становится хрупкой из-за внешних воздействий или чрезмерного старения, поперечный рычаг теряет свою устойчивость. Дефект поперечного рычага Поперечный рычаг представляет собой очень массивный компонент, изготовленный из сварного металла . Пока он не подвергается чрезмерным нагрузкам под давлением или коррозией, практически никаких повреждений произойти не может. Его слабым местом являются запрессованные втулки. Несмотря на то, что они изготовлены из массивной резины, со временем они могут изнашиваться, образовывать трещины или терять эластичность. В результате рычаг управления больше не соединен должным…
Вам также может понравиться

Ограничения скорости, законы и штрафы в Коннектикуте

Двигатели Лифан для мотоблоков

Датчики Accord 7
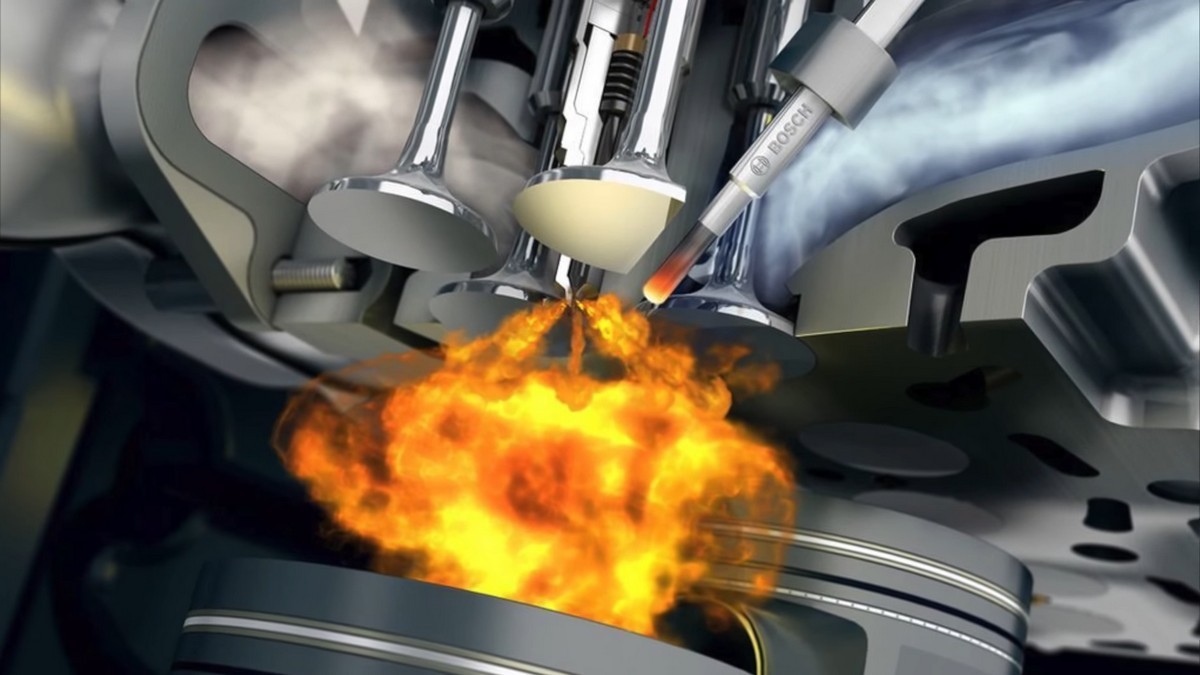
Когда дизельная машина отказывается заводиться – Значит, меняешь свечи накаливания!
Дизельные двигатели относятся к так называемым самовоспламеняющимся. У них нет штатных свечей зажигания, воспламеняющих топливно-воздушную смесь внешней искрой. В дизельных двигателях достаточно быстрого сжатия топлива, чтобы вызвать возгорание. Для этого двигатель должен достичь определенной рабочей температуры. Причина этого кроется в том, что компрессия в дизелях очень высокая. Если двигатель слишком холодный, между поршнем и стенкой цилиндра слишком большой зазор. Потеряна слишком большая компрессия, и двигатель не может запуститься. Только когда двигатель достаточно прогрет, металлы расширяются, обеспечивая процесс сгорания. Поэтому дизельному двигателю требуется помощь при запуске. И тут на помощь приходят свечи накаливания. Функция свечи накаливания Свеча накаливания дизельного двигателя изготовлена из твердой углеродистой стали; электрическое напряжение заставляет его светиться. Когда система впрыска распыляет дизельно-воздушную смесь в камеру сгорания, она воспламеняется…
Для адекватного климат-контроля в автомобиле: Замена салонного фильтра своими руками!
Несмотря на свое название, фильтр пыльцы может делать гораздо больше, чем просто фильтровать пыльцу. Поэтому его также называют салонным фильтром. Эта необходимая запасная часть напрямую влияет на качество воздуха в автомобиле, обеспечивая тем самым правильный климат. К сожалению, этим часто пренебрегают, и многие владельцы автомобилей ездят с грязным пыльцевым фильтром. И это так печально, ведь замена в большинстве автомобилей очень проста! Салонный фильтр – его задачи Основная задача пыльцевого фильтра очевидна, а именно фильтрация нежелательных частиц из впускного воздуха . Это особенно важно в городских условиях, где помимо пыли и грязииз воздуха необходимо фильтровать такие вредные частицы, как сажа, азот, озон, диоксид серы и углеводороды . Отчасти они вызваны другими автомобилями, но также являются побочными продуктами промышленности. С приходом…